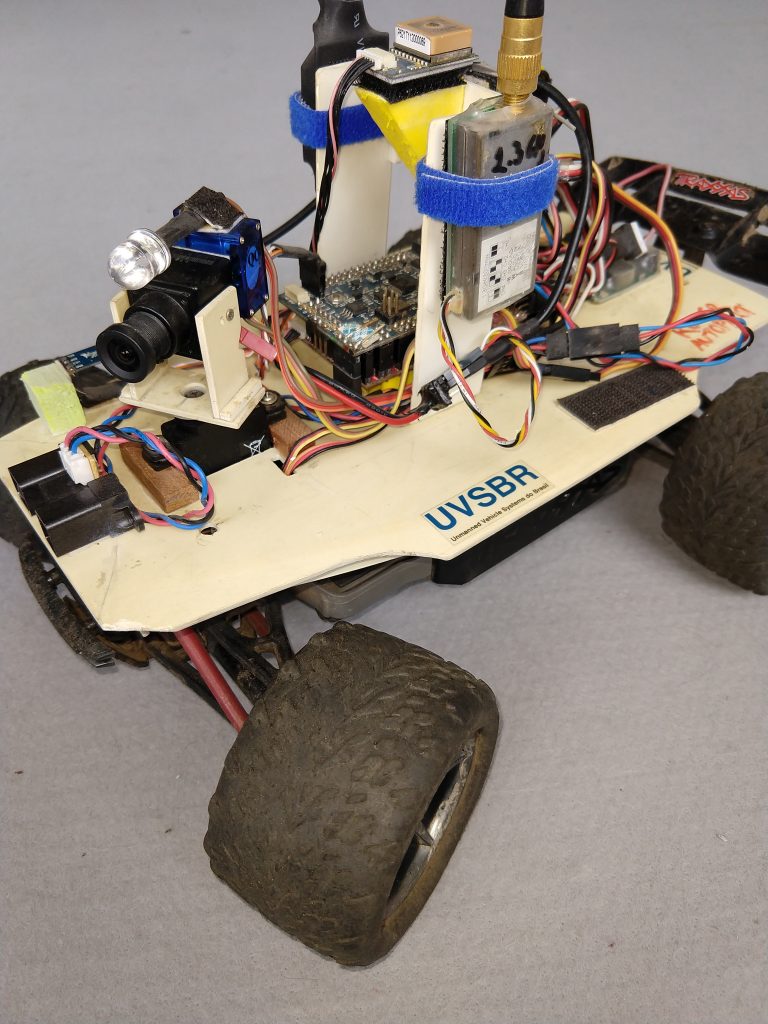
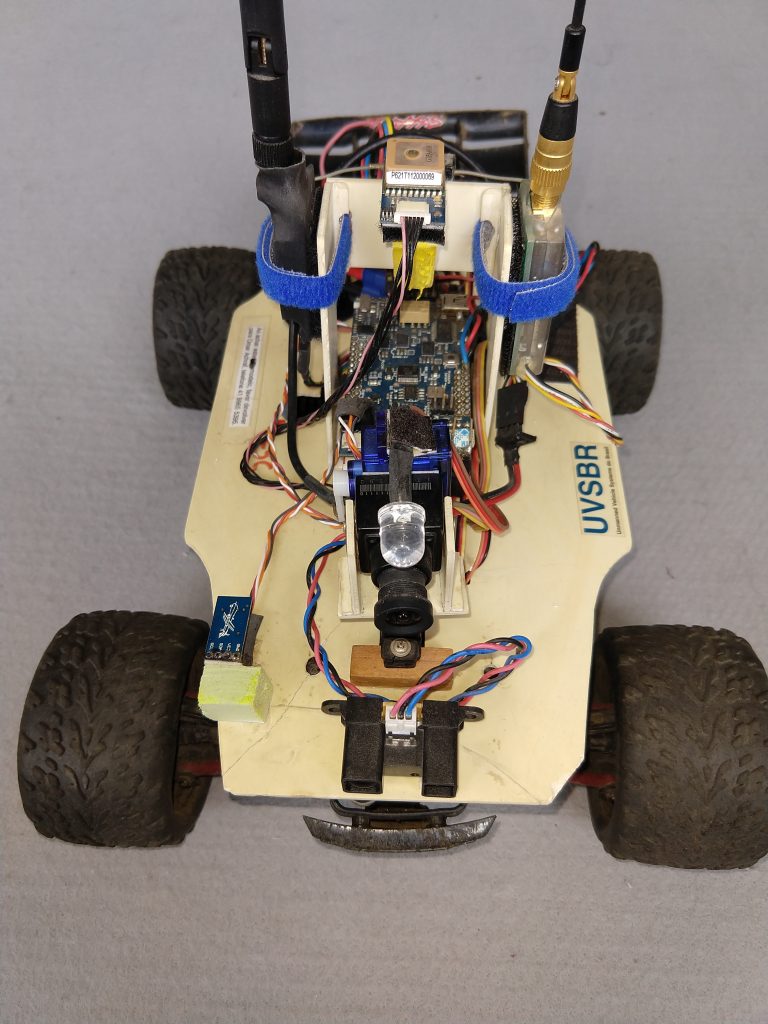
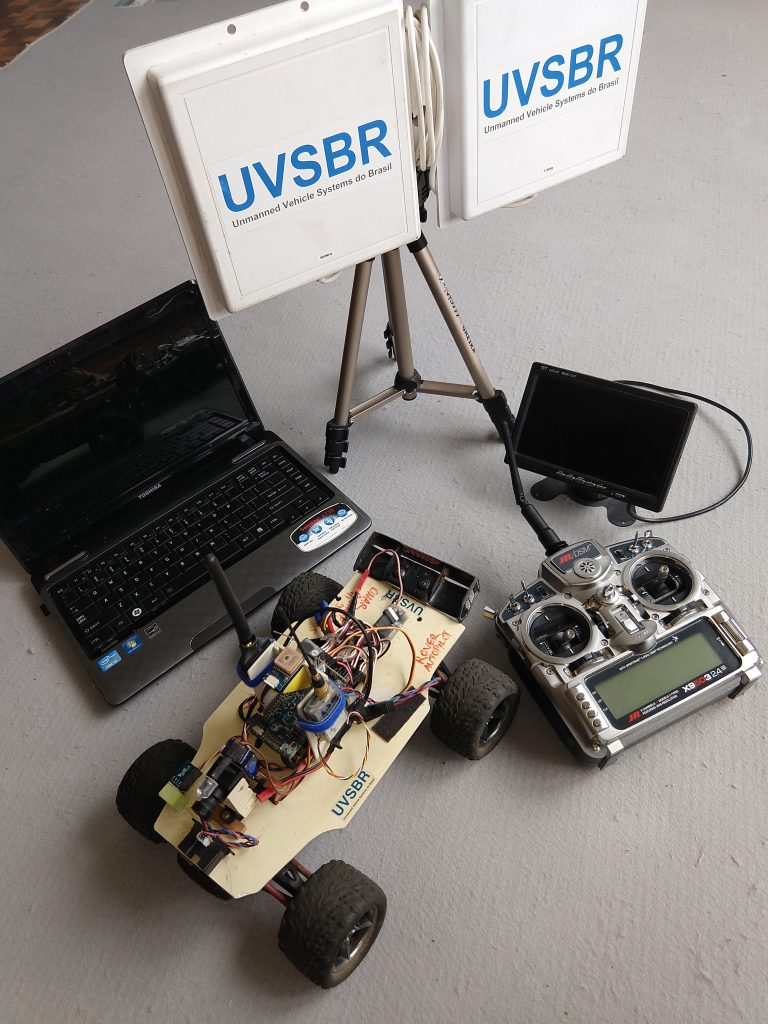
Projeto de uma plataforma Robótica Autônoma com função de Pilot Overriding para ser usado sobre um veículo Radiocontrolado. A plataforma possui camera com movimentos de PAN/TIL, Farol, iluminação a frente, sensor de proximidade, GPS, telemetria com Posição GPS, magnetômetro entre outros sensores. Programação de missão e visualização em sistema de software em Estação de controle Remota.