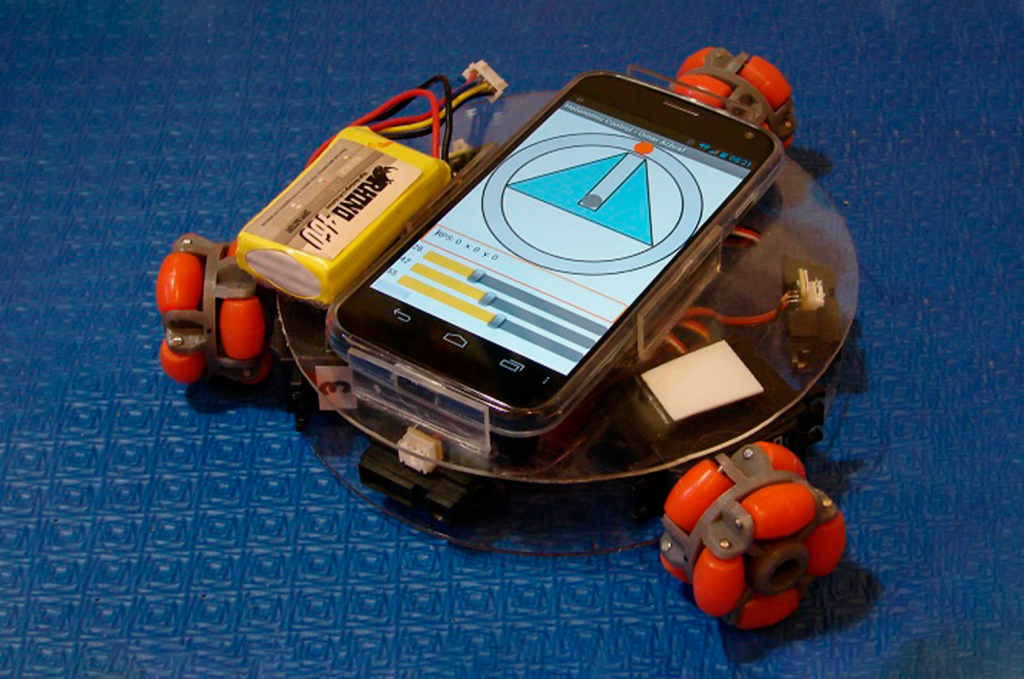
Modelagem de um robô holonômico simulado geometricamente e fisicamente através do simulador V-REP. O controle de velocidade, geração de mapa do ambiente, planejamento de rota e navegação é realizado através de programação e uso do framework ROS. A implementação física utiliza rodas ominidirecionais, servos, sensores infra-vermelhos, módulo micro controlado com ROS, celular android com aplicação de comando remoto conectado via bluetooth.
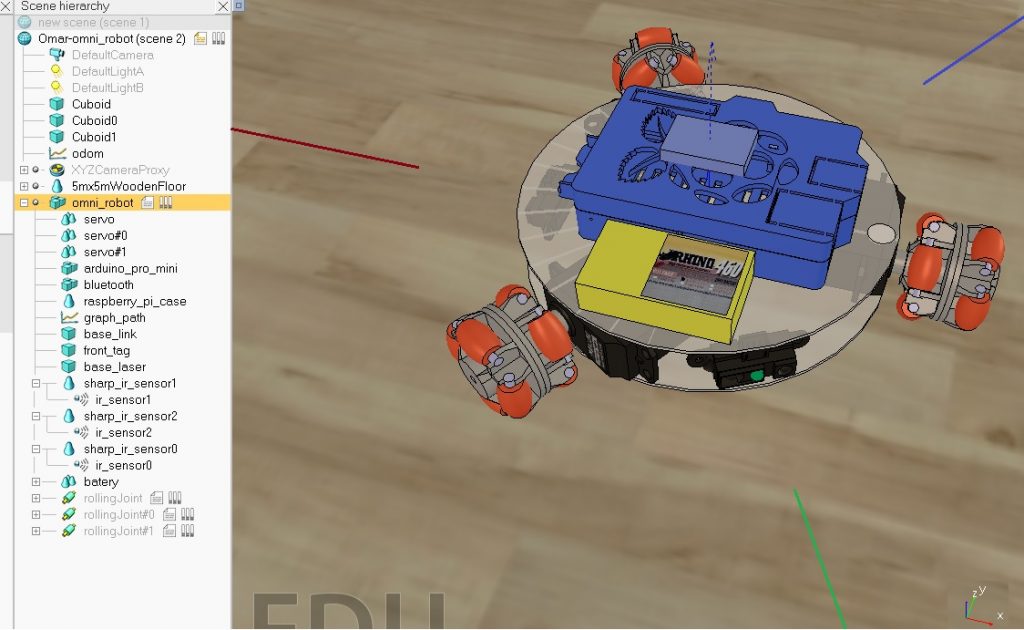
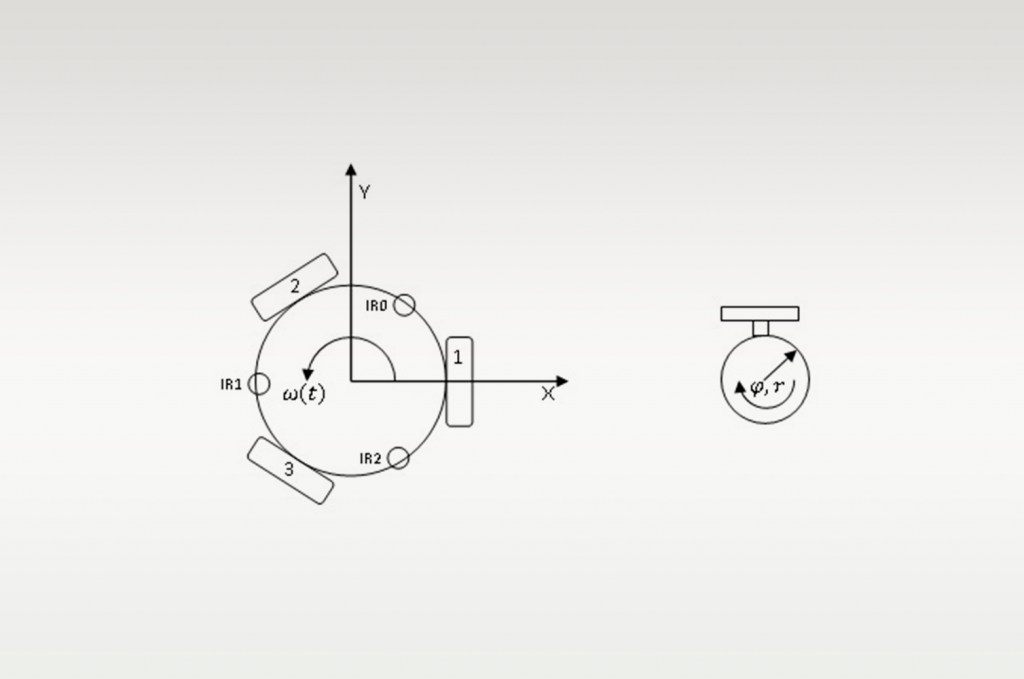
Neste projeto de robô Holonômico, foi realizado a modelagem para controle com 2 vetores velocidade linear e velocidade angular. O robô foi modelado em Simulador V-Rep e ROS Por fim o celular se comunica com o hardware via bluetooth podendo ser destacado para uso de controle remoto ou deixado junto para aproveitar os sensores de giroscópio e posição.