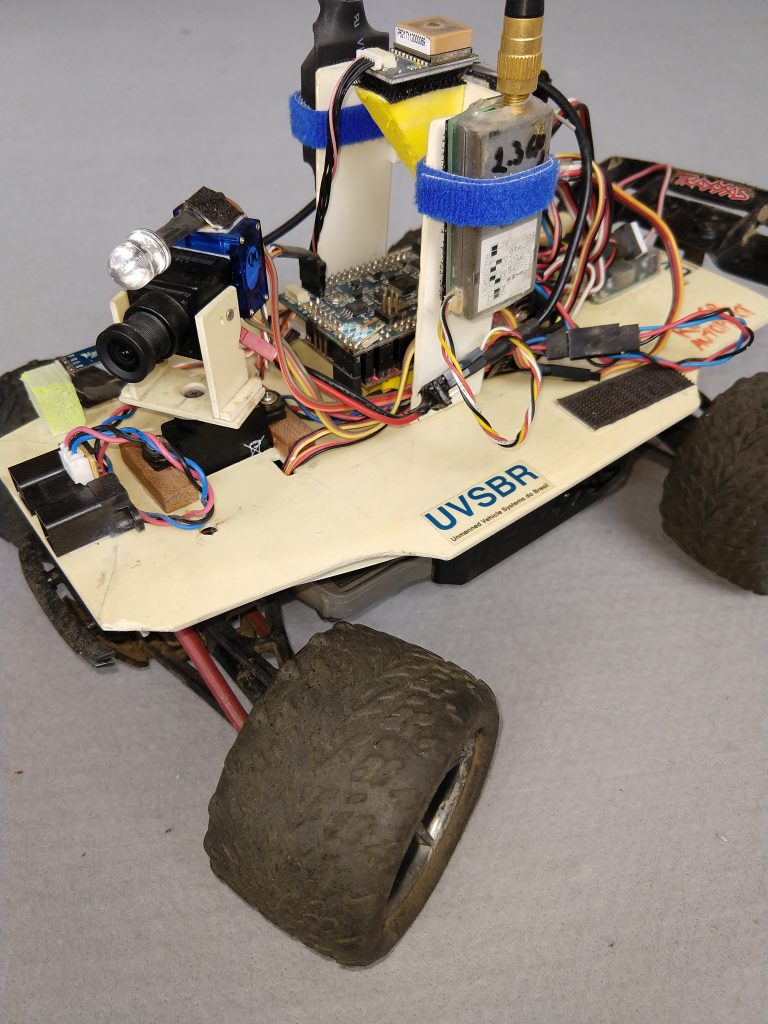
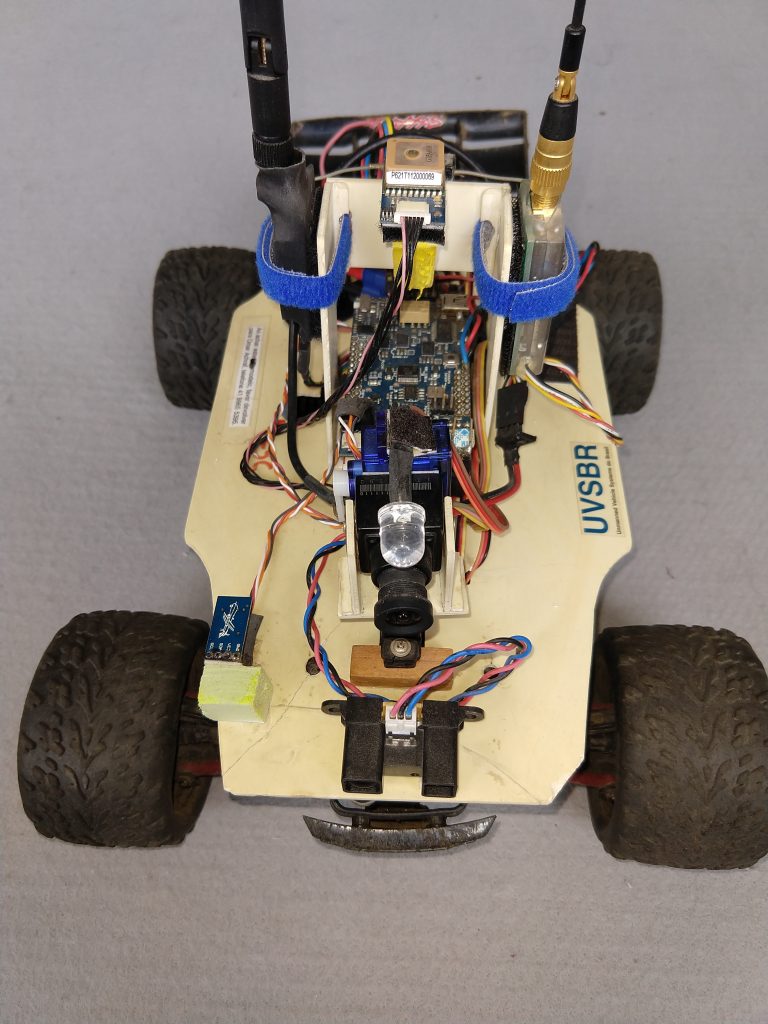
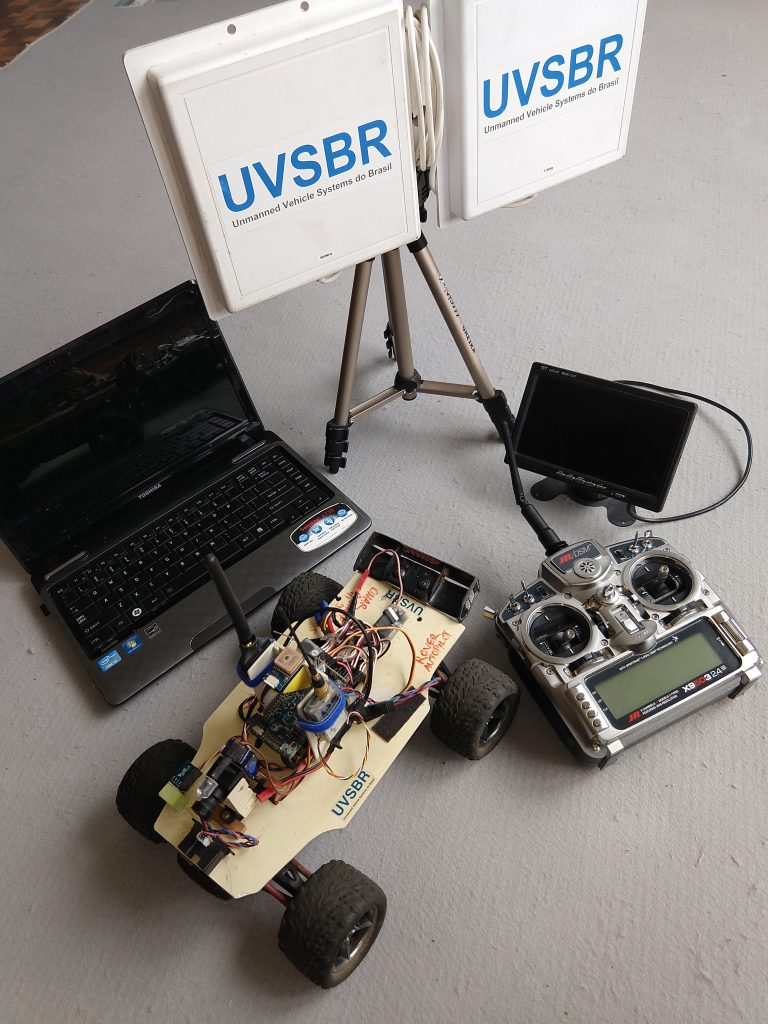
Proyecto de una plataforma Robótica Autónoma con función Pilot Overriding para ser utilizada en un vehículo Radiocontrolado. La plataforma cuenta con cámara con movimientos PAN/TIL, faro, iluminación delantera, sensor de proximidad, GPS, telemetría con posición GPS, magnetómetro y otros sensores. Programación y visualización de misiones en un sistema software en una Estación de Control Remoto.