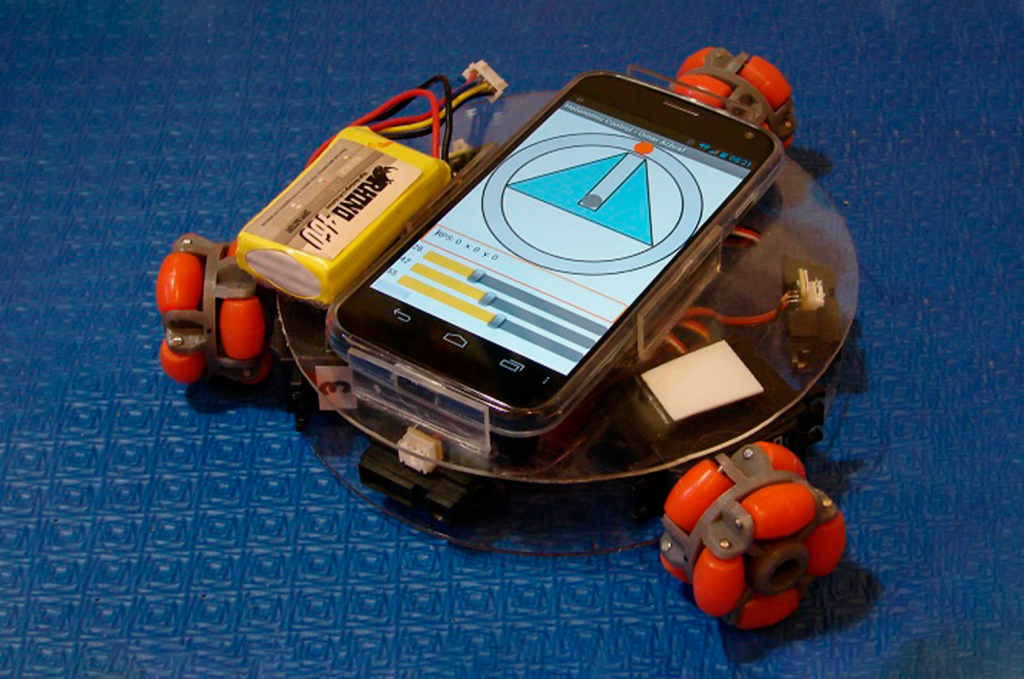
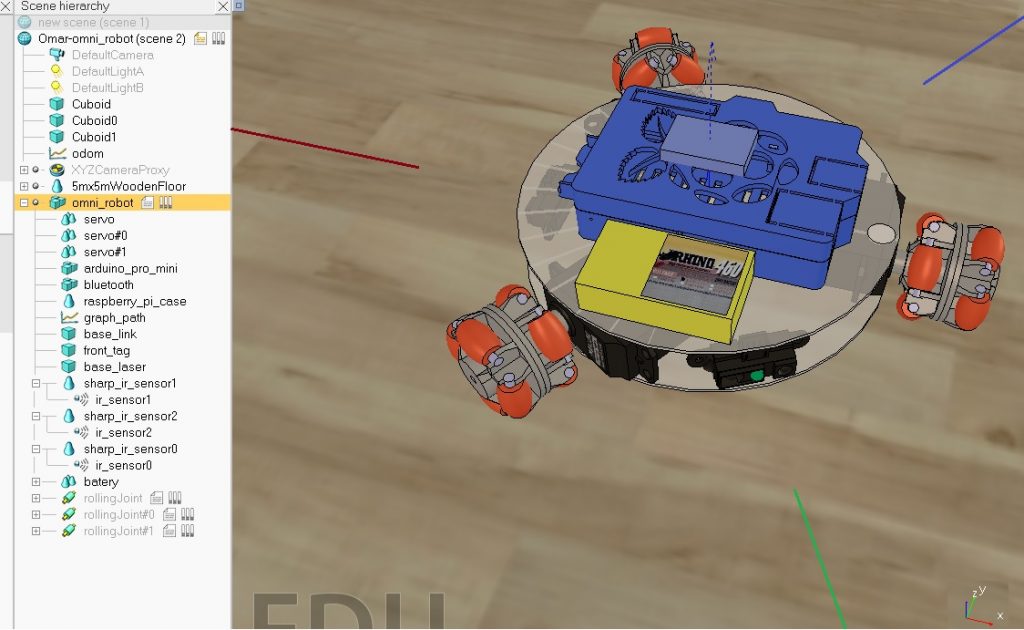
Modeling of a holonomic robot simulated geometrically and physically through the V-REP simulator. Speed control, generation of environment map, route planning and navigation are performed through programming and use of the ROS framework. The physical implementation uses omnidirectional wheels, servos, infrared sensors, micro-controlled module with ROS, and an Android cell phone with a remote control application connected via Bluetooth.
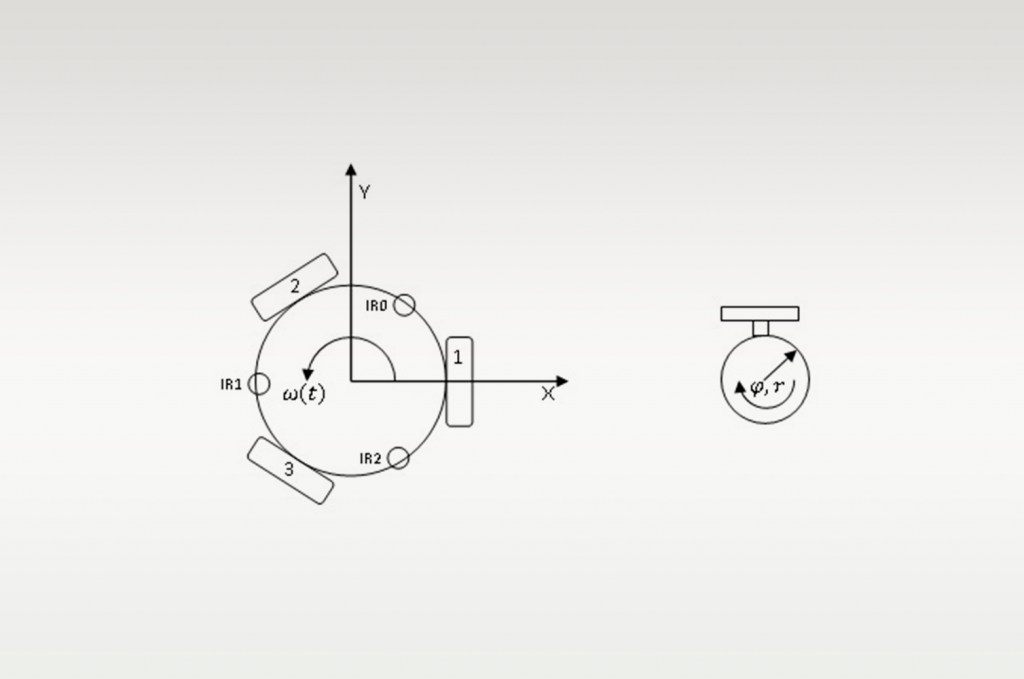
In this holonomic robot project, modeling was performed for control with 2 vectors: linear velocity and angular velocity. The robot was modeled in the V-Rep Simulator and ROS. Finally, the cell phone communicates with the hardware via Bluetooth and can be detached for use as a remote control or left with it to take advantage of the gyroscope and position sensors.