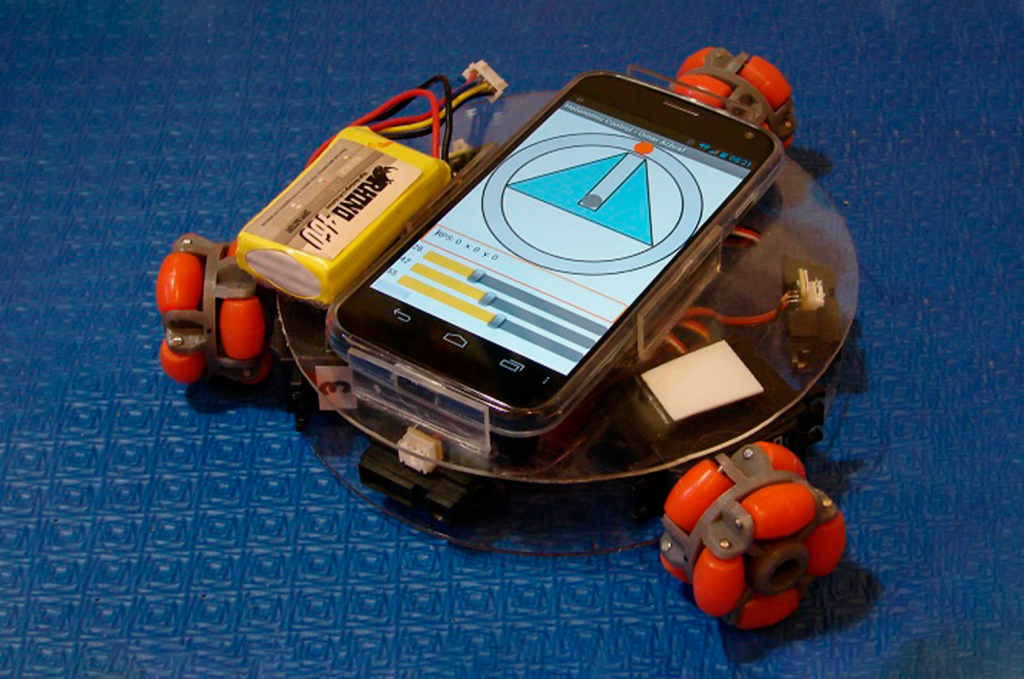
Modelado de un robot holonómico simulado geométrica y físicamente mediante el simulador V-REP. El control de velocidad, la generación de mapas ambientales, la planificación de rutas y la navegación se llevan a cabo mediante la programación y el uso del marco ROS. La implementación física utiliza ruedas omnidireccionales, servos, sensores infrarrojos, micro módulo controlado con ROS, celular android con aplicación de comando remoto conectado vía bluetooth.
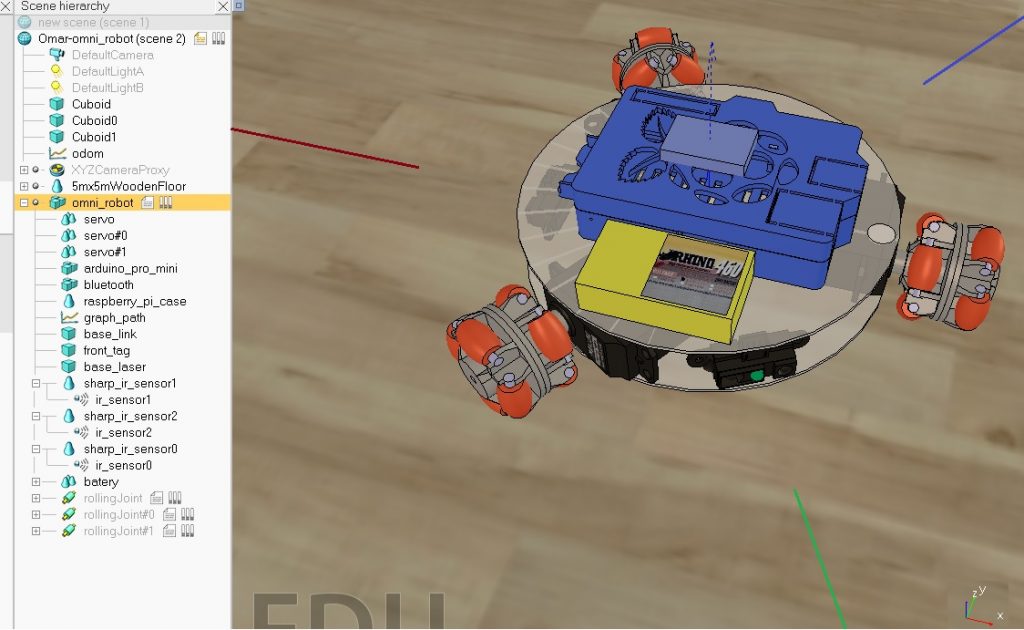
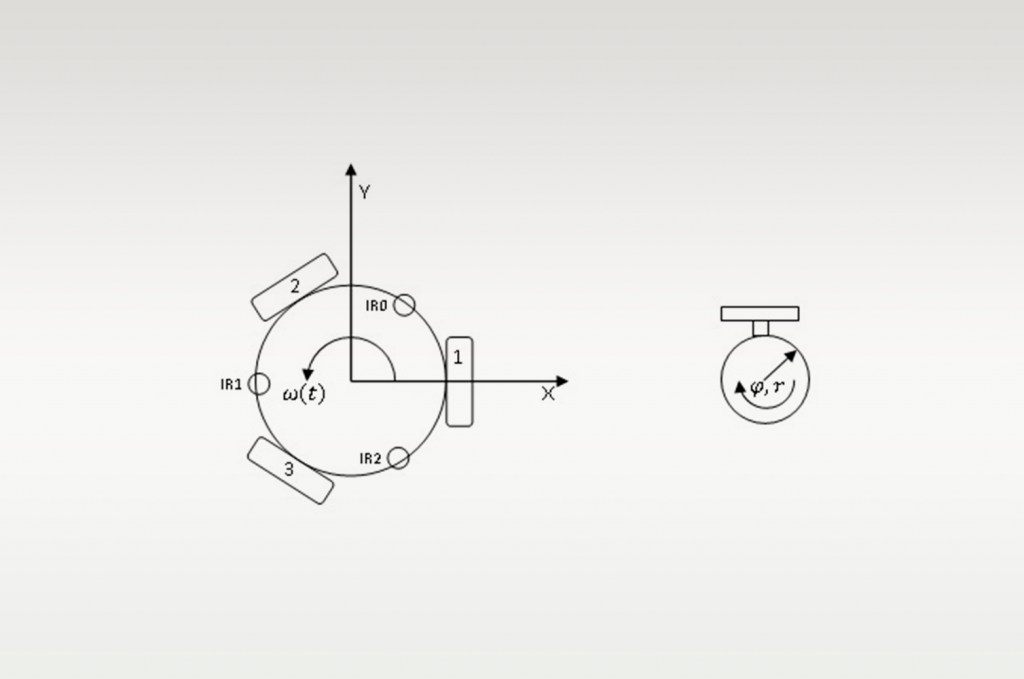
En este proyecto de robot holonómico se realizó el modelado para control con 2 vectores de velocidad lineal y velocidad angular. El robot fue modelado en simuladores V-Rep y ROS. Finalmente, el teléfono celular se comunica con el hardware a través de Bluetooth y puede separarse para uso de control remoto o dejarse junto para aprovechar el giroscopio y los sensores de posición.